What if we could create robots with the grace and robustness of biological organisms to ease the labour challenges of tomorrow?
Defined by our Programme Directors (PDs), opportunity spaces are areas we believe are likely to yield breakthroughs.
In Smarter Robot Bodies, we seek to understand how progress in AI, control, materials, and manufacturing could help improve robotic bodies, unlock the benefits of intelligent machines, and improve human productivity and welfare.
Beliefs
The core beliefs that underpin this opportunity space:
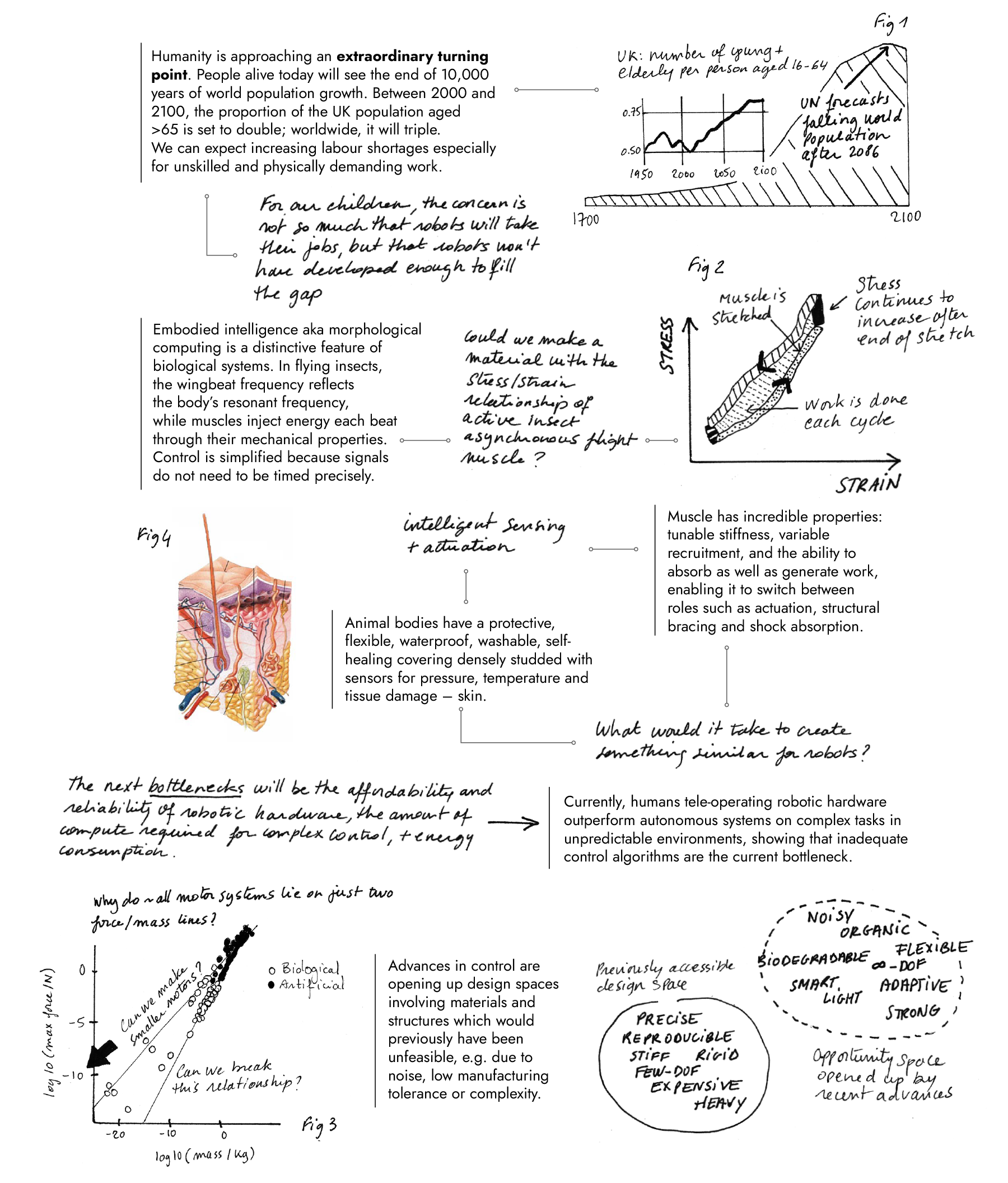
A world where robots free humanity from physical labour is not only possible → it is imperative if we wish to boost longevity and prosperity.
Advances in sensing and computation are improving robot brains, but that alone won’t enable ubiquitous robotics → limitations of robot bodies will soon be the critical obstacle.
Progress in AI, control, materials, and manufacturing opens up previously inaccessible design spaces → we can exploit these to build robots that approach or even exceed the capabilities of living bodies.

Programme: Robot Dexterity
To build a programme within an opportunity space, our Programme Directors direct the review, selection, and funding of a portfolio of projects.
We’re funding cutting-edge research across robotic hardware and advanced simulation to demonstrate a paradigm-shift in robotic abilities. Backed by £57m, this programme aims to transform robotic capabilities and unlock a step change in human productivity.

Jenny Read at Venture Café's Global Gathering
Hear Programme Director, Jenny Read, speaking at Venture Café Tokyo's Global Gathering as part of a discussion on 'Global Robotics Frontiers: An intercontinental dialogue on future robotics'.
Opportunity seeds
Outside the scope of programmes, with budgets of up to £500k, these opportunity seeds support ambitious research aligned to the Smarter Robot Bodies opportunity space.
From kangaroo-inspired robot locomotion to precise, dexterous, and versatile bioactuators, we're funding an array of projects across start ups, universities, and individuals to maximise the chance of breakthroughs.
Miniaturised Multimodal Sensors Mimicking Skin Mechanosensation for AI-Enhanced Neurovascular Precision
Rujie Sun, University of Southampton
Shape Changing Origami Inspired Probe for Autonomous Bi-directional Navigation for Multimodal Inspection in the Colon
Thrishantha Nanayakkara, Imperial College London
Smarter Motors for Smarter Robots
Christopher Wall, Cardiology Devices
Linkage-leg Principles for ‘Better Than Wheels’ Functionality
Jim Usherwood, The Royal Veterinary College at Hawkshead
Developing and Modelling Flexible Robotic and Cobotic Arms
Andy Whyte + Chris Mangnall, Adaptive Machine Patterns
Roo-bot Energy-Efficient Robot Locomotion Inspired by Kangaroos
Christofer Clemente, University of the Sunshine Coast
MORPH: Muscular Operative Robotic Precision Handler
Pietro Valdastri, University of Leeds
JumpSTAR: Jumping with Mechanical Precision and Stability Through Adaptive Resilience
Chengxu Zhou, University College London
Workshops
Since we began funding projects within the Smarter Robot Bodies opportunity space – both through opportunity seeds and the Robot Dexterity programme – we’ve facilitated multiple workshops to support Creators and enable knowledge-sharing and collaboration. Catch up on the workshops by watching the recordings below.

Sign up for updates
Stay up-to-date on our opportunity spaces and programmes, be the first to know about our funding calls and get the latest news from ARIA.